В радиолюбительской литературе встречается немало конструкций радаров, измеряющих расстояние до заданного предмета, при помощи метода подсчета времени между излучением ультразвукового импульса и приемом отраженного сигнала. Но такой метод не годится для радара на основе инфракрасного излучения (скорость света слишком высока).
В данной статье рассматривается другой метод измерения расстояния, основанный на дискретном изменении мощности инфракрасного излучения и регистрации отраженного сигнала фотоприемником.
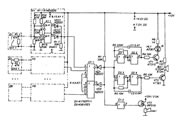
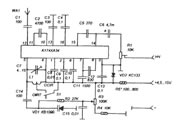
В основе конструкции лежит микроконтроллер (D2) типа PIC16F628, который управляет алгоритмом измерения расстояния. Излучатель - ИК-светодиод HL1, мощность его излучения изменяется простейшим цифро-аналоговым преобразователем на VT1-VT4 и R1-R8. Приемник интегральный, - ILM5360 (D1). В его состав входит высокочувствительный фотодиод и демодулятор на частоту 36 кГц.
Результат измерения отображается на двух разрядах трехразрядного светодиодного семи-сегментного индикатора (HG1) ТОТ3361. В порты RB0-RB6 выдаются данные, а транзисторы VT5-VT6 попеременно коммутируют разряды индикатора. Питается устройство от источника постоянного напряжения 9-12V. D3 (КР142ЕН5А) - стабилизатор напряжения, а заградительный фильтр на С1-С4 и R9 предотвращает проникание помех по питанию к микросхеме D1.
Рассмотрим вкратце алгоритм работы радара. По метке «START» (далее так будем обозначать метки) происходит инициализация портов и регистров микроконтроллера. «CIKL» это начало циклической программы. Далее контроллер выдает пачку импульсов длительностью 10 мкс и периодом 27 мкс. Количество импульсов, минус один, находится в константе К К I. По метке «EN Р» переходим на цикл ожидания отрицательного перепада от микросхемы D1. Максимальное время (если не будет получен импульс) которое контроллер будет находится в цикле находится в константе K_O_I. В цикле «VI» происходит увеличение и подсчет длительности импульса и запись в регистр R D I до тех пор, пока не будет получен положительный перепад от D1. По состоянию этого регистра в дальнейшем определяется увеличивать или уменьшать ток светодиода. Если длительность импульса уменьшается, значит, предмет удаляется, а если увеличивается - предмет приближается. Начиная с «М IND» программа выполняет цикл задержки между пачками импульсов и вывод на индикацию.
Преобразование из бинарного кода в десятичный производится табличным методом по метке «bin dec». Этот метод позволяет небольшим количеством шагов выполнить преобразование, в отличие от других методов, и что самое важное, индицировать оба разряда с одинаковой длительностью и , тем самым, обеспечить равномерное свечение индикаторов. Для вывода данных непосредственно в семисегментный индикатор необходимо произвести еще и двоично-семисегментное преобразование при помощи таблицы «segment».
Налаживание устройства сводится к записи необходимых кодов перекодировки в таблицу «rastoynie», после того как устройство будет собрано, опробовано и измерены расстояния между предметом и радаром. Эта процедура необходима для того чтобы индицируемое расстояние соответствовало действительному. Следует упомянуть, что отражательная способность предметов разная и зависит не только от плотности, но и от цвета.
Устройство собрано на плате (рис. 2) из одностороннего фольгированного стеклотекстолита размерами 58x45 мм. Светодиод HL1 заключен в воронкообразный, черный непрозрачный для ИК излучения экран, так чтобы излучение с него попадало на фотоприемник только в результате отражения от предмета.
Рисунок 2