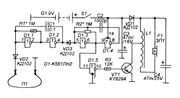
В наше время никого не удивить разнооборазными радиоуправляемыми игрушками, практически у каждого из нас были машинки, грузовики, танки управляемые при помощи пульта ДУ или проводными устройствами. В этой схеме хочу вам показать схему программируемого вездехода на гусеничном ходу. Игрушка приводится в действие электродвигателями (по одному на каждую гусеницу). Схема довольна простая и состоит из задающего генератора на элементах D1.3 и D1.2, счетчика D2 и шестнадцатиричного дешифратора сделанного на микросхемах D3 и D4.
Также есть два транзисторных ключа VT1-VT2 и VT3-VT4, которые управляют питанием двух электродвигателей приводящих разные гусеницы. Электродвигатели и цифровая часть питаются от разных источников. Для задания программы служат 30 гнезд Х1-Х30, по 15 для каждой гусеницы. Гнезда располагаются на кабине игрушки в два ряда, параллельно гусеницам. Таким образом получается 15 тактов движения вездехода. Если нужно чтобы он двигался прямо, фишки устанавливаются в одноименные гнезда. Если на каком то такте нужно повернуть, то в гнездо той гусеницы, в сторону которой будет поворот, на этом такте фишка не устанавливается. Если остановка — на нужном такте нет фишек в обеих рядах. Скорость выполнения программы можно задавать при помощи переменного резистора R1. По окончании всех 15-ти тактов, на 16-м такте происходит остановка вездехода — единичный уровень поступает на вывод 9 D1.3 и блокирует прохождение импульсов на вход счетчика. Снова запустить программу можно нажатием на кнопку S1. Число микросхем можно сократить до двух если уменьшить число тактов до 9-ти, и использовать счетчик К561ИЕ8. В этом случае дешифратор не потребуется (он уже есть в микросхеме).
|